The area where we usually meet is being cleaned heavily this entire week and upcoming weekend, so the entire team is taking a week off before school starts next week.
We are going to start recruiting for the incoming freshmen and it will be interesting to see how we handle this Fall semester. Last year, the new students worked alongside the veteran members. This year, we may try and field a truly freshmen team and a sophomore fall semester team.
Below is the latest update from the robot that our student Evan is working on -
Below is potentially one idea for what will become the second stage of this arm -
Here's a quick update from earlier tonight. We weren't able to do much tonight because we were preparing for Saturday's FRC competition.
The H-Drive had some tower updates. Rack and pinions were added to the tower so that the mechanism can reach the 30" goals. The picture shows one side of the tower, the other side was added after the picture.
The 'H' in the drive was removed so that the tower/mechanism could use more motors
For the 6-wheel drive, I started prototyping a 6-bar linkage/extended 4-bar.
Next Tuesday, I will upload pictures of the prototype. (no Saturday update)
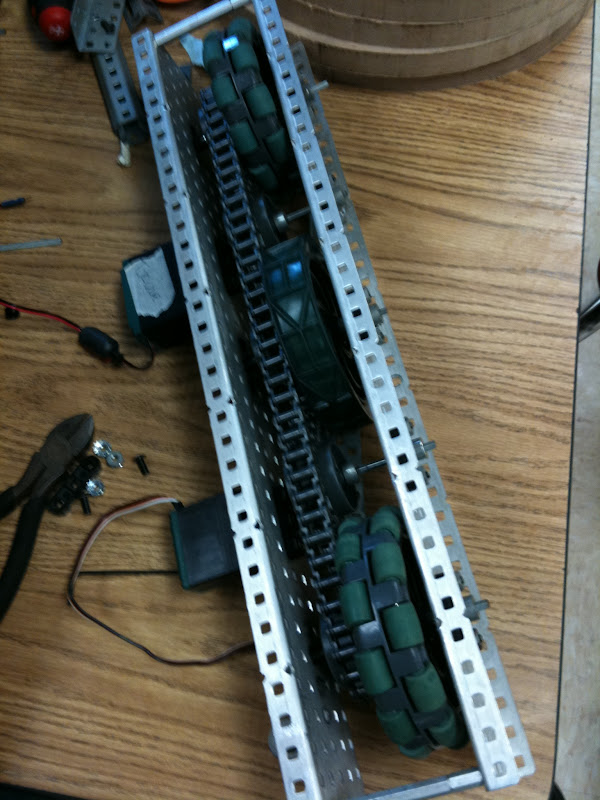
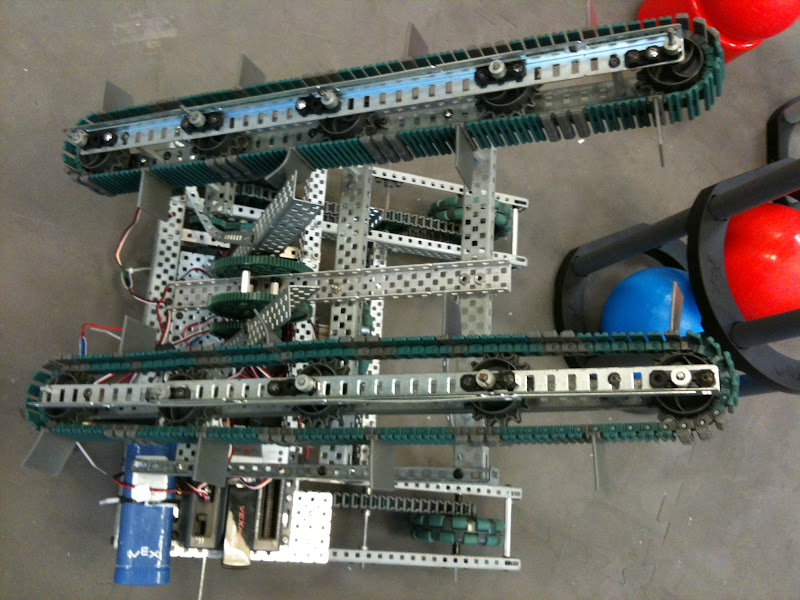
The above photos are of the completed 6-wheel drive train that I've been working on. I plan on adding gripping on the middle traction wheel so that they are level with the omni-wheels.
Before I add the tower+claw from the other drive, I plan on prototyping a 6 bar linkage and a roller claw. (not necessarily together)
Another member of the team has been working on a drive to support his mechanism. (the c-shaped drive in the video below) The drive was made from a failed holonomic base that was attempted beforehand.
Disclaimer: this base is not to be confused with the other C-Drive/Bracket Drive that I've made.
Our h-drive has also been tested recently.
The video (below) show how the mechanism works. The other members plan on adding support to the mechanism to prevent the shaky behavior when moving. Linear actuators will also be added so that the mechanism can reach the 30" goals.
This past Saturday, many changes were made to my robot. I've completely redone the drive from the ground up. The bracket drive was not working out due to tipping and excessive weight. This lead to a new 6-wheel drive train in its place.
The drive uses 4 motors to power chain connected to 6 wheels.
The other robot our team is working on has been upgraded in terms of a mechanism.
The mechanism intakes from the front of the drive, then rotates upwards and reverses the intakes so that objects fall into the goals.









{kind=link}
{kind=link}