Updated By: Michael Pereira
Today team 357 had a mini-lesson about Torque. (Torque = Length of Lever Arm x Force [ t= (r) x ( F) ]. This is important to figure out the appropriate gear ratio to account for when designing our mechanisms. Using the formula for torque, we can determine how heavy and large our mechanisms can be without risking destroying our motors in the process.
After the lesson on torque, we discussed possible mechanisms to use for this year's competition. They included specifically a conveyor system on a 4-bar arm and a claw mechanism attached to a 4-bar arm.
After that we had split off into our separate groups and worked on different parts of the robot.
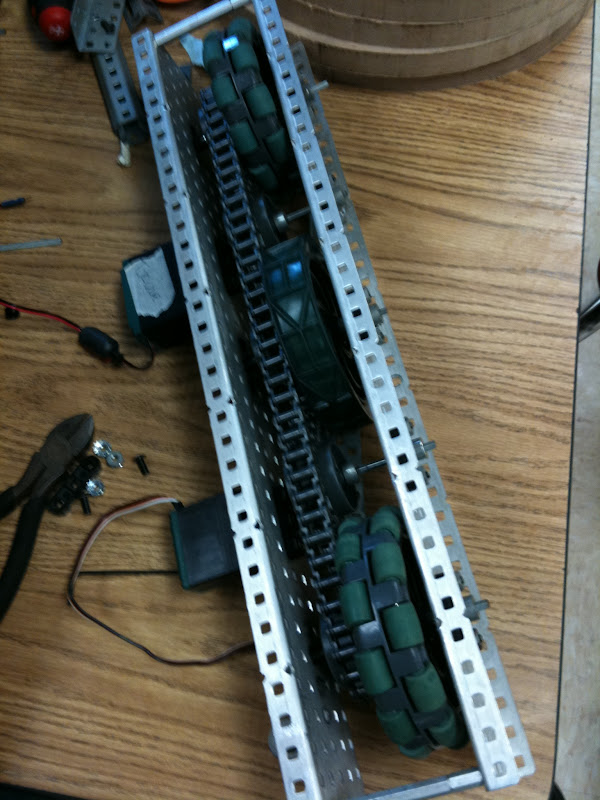
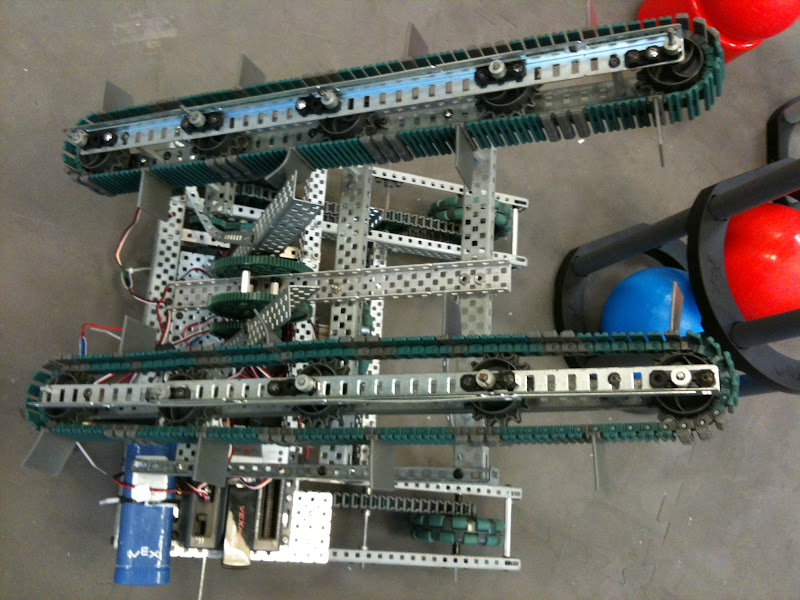
Some worked on the H-Drive and a member, Evan, completed the C-Drive prototype drive base. Two members of the team began working on a conveyor-belt system for a mechanism.
More photos after the break!


 Recently, we noticed that the arms on my robot wobbled too much. So we set out to fix this. What we came up with was surgical tubing going from connection point of the two arms to a rail. As the arm moves to different positions, the support will move along the rail to line up and continue to provide support.
Recently, we noticed that the arms on my robot wobbled too much. So we set out to fix this. What we came up with was surgical tubing going from connection point of the two arms to a rail. As the arm moves to different positions, the support will move along the rail to line up and continue to provide support.
 (
(






































{kind=link}
{kind=link}
{kind=link}