This past Saturday, many changes were made to my robot. I've completely redone the drive from the ground up. The bracket drive was not working out due to tipping and excessive weight. This lead to a new 6-wheel drive train in its place.

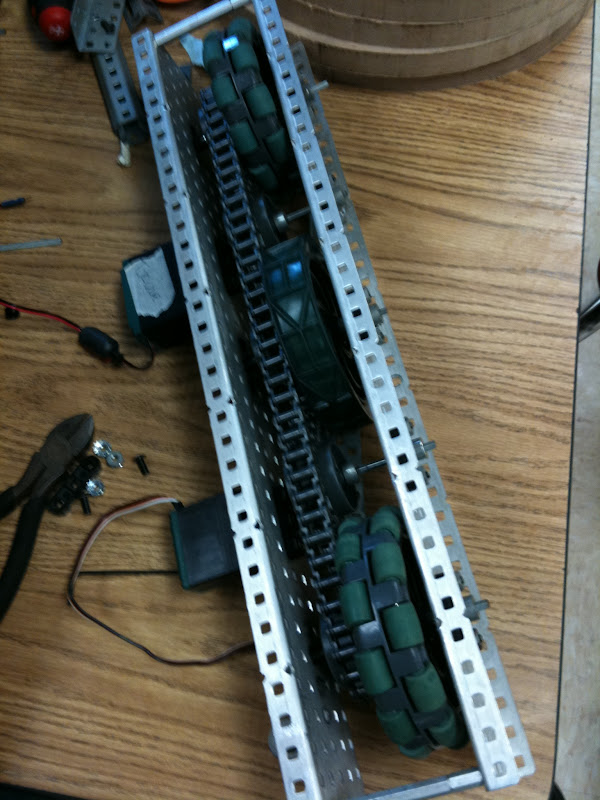
The drive uses 4 motors to power chain connected to 6 wheels.
The other robot our team is working on has been upgraded in terms of a mechanism.

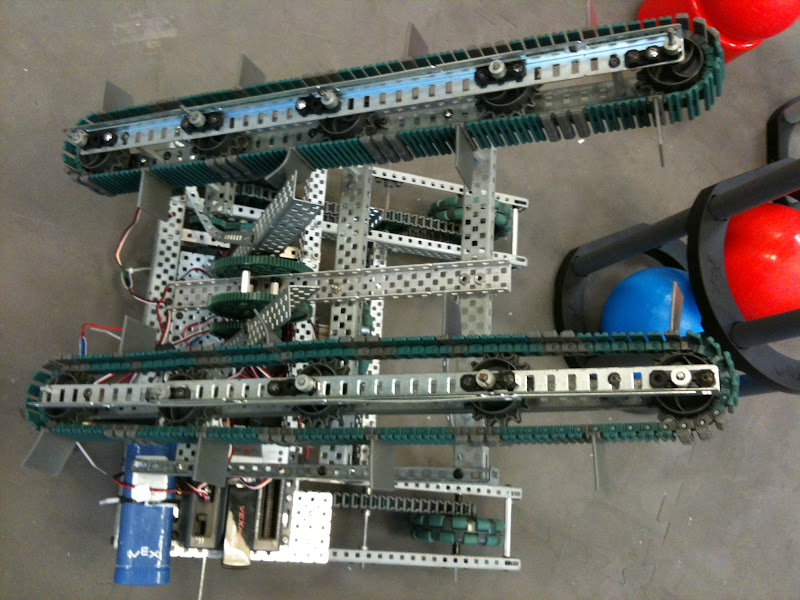
The mechanism intakes from the front of the drive, then rotates upwards and reverses the intakes so that objects fall into the goals.
{kind=link}
what is the name of the robot
ReplyDelete