We are going to start recruiting for the incoming freshmen and it will be interesting to see how we handle this Fall semester. Last year, the new students worked alongside the veteran members. This year, we may try and field a truly freshmen team and a sophomore fall semester team.
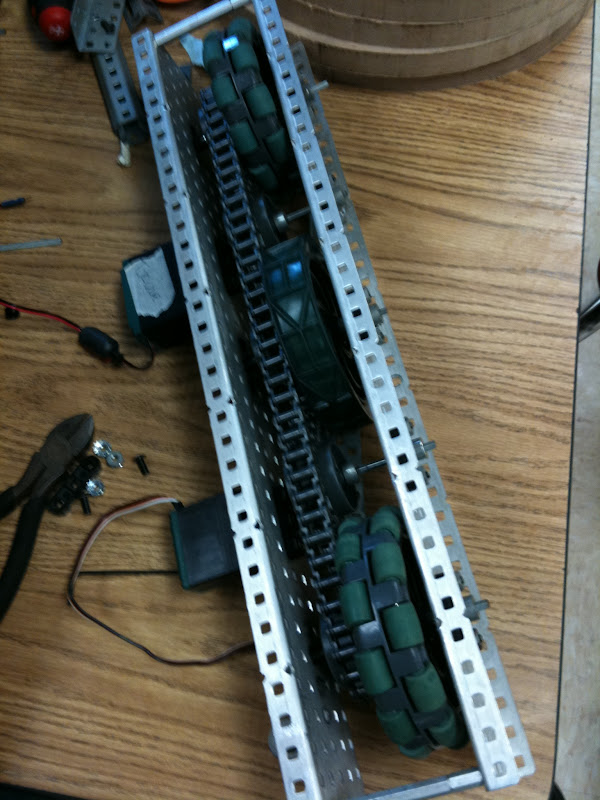
Below is the latest update from the robot that our student Evan is working on -

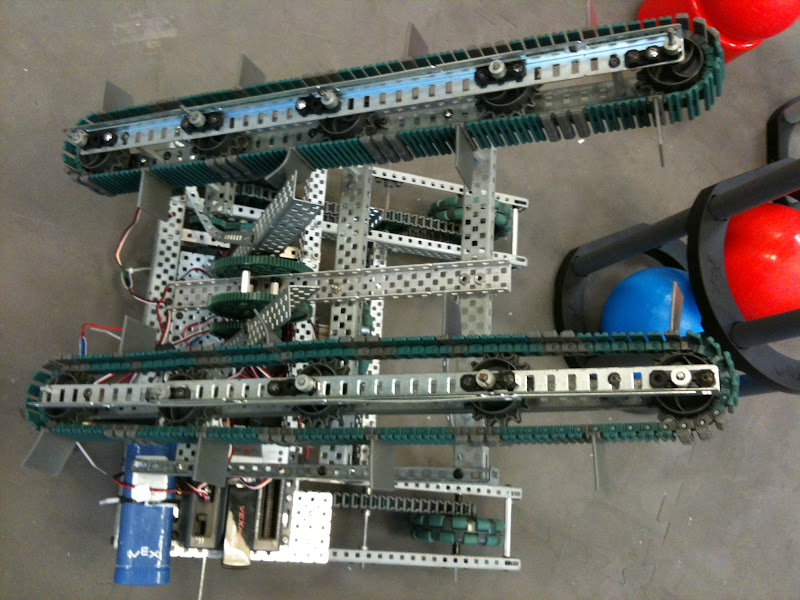
Below is potentially one idea for what will become the second stage of this arm -








{kind=link}
{kind=link}