
Wednesday, February 29, 2012

Friday, September 30, 2011
Update from 9-29


 Recently, we noticed that the arms on my robot wobbled too much. So we set out to fix this. What we came up with was surgical tubing going from connection point of the two arms to a rail. As the arm moves to different positions, the support will move along the rail to line up and continue to provide support.
Recently, we noticed that the arms on my robot wobbled too much. So we set out to fix this. What we came up with was surgical tubing going from connection point of the two arms to a rail. As the arm moves to different positions, the support will move along the rail to line up and continue to provide support.
Sunday, September 18, 2011
Grand Ol' Update
 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5)Many advancements have been made on the 6WD robot. The roller claw has been finished and added to the robot. On the 2nd stage of the arm, we've added a 5:1 gearing from the motor to the sprocket. This will make it so that the arm can support the weight of the claw and game objects. (picture 1-3)
The other team has also finished their intake system. They added gearing on the top of the tower so that it can pivot to reach higher towers. Testing for this mechanism will be most likely be done Saturay the 24th. (pictures 4-5)
There will be no updates on Tuesday the 20th or Thursday the 22nd.
Friday, September 2, 2011
Update from 9/1
In preparation for upcoming events. We've decided to create a sensor bot. Using the values/codefrom this bot, we will create autonomous codes for our competition bots.
For my robot, I've added the second stage of the arm. During our next meeting, I will prototype a roller claw.


There will be no update for 9/3 due it beeing Labor Day weekend.
Thursday, August 25, 2011
Last Week Off Before School Starts
The area where we usually meet is being cleaned heavily this entire week and upcoming weekend, so the entire team is taking a week off before school starts next week.
We are going to start recruiting for the incoming freshmen and it will be interesting to see how we handle this Fall semester. Last year, the new students worked alongside the veteran members. This year, we may try and field a truly freshmen team and a sophomore fall semester team.
Below is the latest update from the robot that our student Evan is working on -

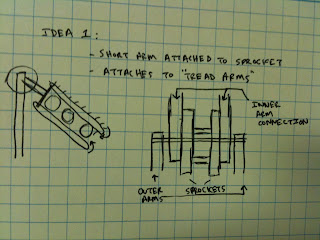
Below is potentially one idea for what will become the second stage of this arm -
We are going to start recruiting for the incoming freshmen and it will be interesting to see how we handle this Fall semester. Last year, the new students worked alongside the veteran members. This year, we may try and field a truly freshmen team and a sophomore fall semester team.
Below is the latest update from the robot that our student Evan is working on -

Below is potentially one idea for what will become the second stage of this arm -

Thursday, August 11, 2011
Update from 8-11
Here's a quick update from earlier tonight. We weren't able to do much tonight because we were preparing for Saturday's FRC competition.


{kind=link}
{kind=link}
{kind=link}
The H-Drive had some tower updates. Rack and pinions were added to the tower so that the mechanism can reach the 30" goals. The picture shows one side of the tower, the other side was added after the picture.
The 'H' in the drive was removed so that the tower/mechanism could use more motors
For the 6-wheel drive, I started prototyping a 6-bar linkage/extended 4-bar.
Next Tuesday, I will upload pictures of the prototype. (no Saturday update)
Update from 8-9 Meeting


 The above photos are of the completed 6-wheel drive train that I've been working on. I plan on adding gripping on the middle traction wheel so that they are level with the omni-wheels.
The above photos are of the completed 6-wheel drive train that I've been working on. I plan on adding gripping on the middle traction wheel so that they are level with the omni-wheels.Before I add the tower+claw from the other drive, I plan on prototyping a 6 bar linkage and a roller claw. (not necessarily together)
Another member of the team has been working on a drive to support his mechanism. (the c-shaped drive in the video below) The drive was made from a failed holonomic base that was attempted beforehand.
Disclaimer: this base is not to be confused with the other C-Drive/Bracket Drive that I've made.
Our h-drive has also been tested recently.
The video (below) show how the mechanism works. The other members plan on adding support to the mechanism to prevent the shaky behavior when moving. Linear actuators will also be added so that the mechanism can reach the 30" goals.
Subscribe to:
Posts (Atom)